El reto de la robótica en la manipulación de elementos flexibles
Informe realizado por Inescop.
-
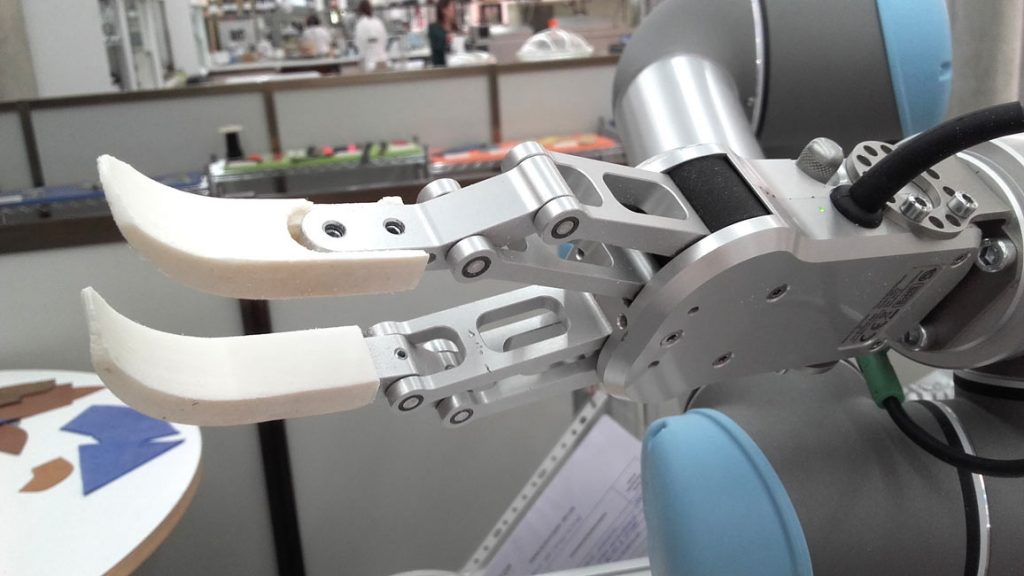
- Manipulador mecánico colaborativo.
Hablar de industria 4.0 y no hablar de robótica es impensable. La robótica se ha convertido en parte fundamental de este nuevo concepto industrial gracias a que su implantación mejora la productividad, disminuye los costes e incrementa la calidad de los productos fabricados. Sin embargo, la incorporación de los robots presenta grandes diferencias según el sector y solo el 0,2 por ciento se encuentran ubicados en sectores tan tradicionalmente manufactureros como el textil y el calzado.
La carencia de robots en el sector calzado, lejos de suponer un problema, representa un enorme potencial de crecimiento. Pero para ello es necesario que sean capaces de atender las necesidades específicas de un sector singular, con un proceso productivo complejo y de gran variabilidad, que implica la manipulación de piezas con geometrías diversas y de materiales flexibles donde, además, la interacción hombre-robot se presenta como una necesidad ineludible.
En este sentido, en el marco del proyecto MANICOBOT, financiado por IVACE y fondos Feder, Inescop está trabajando en el desarrollo de sistemas de manipulación adecuados a las etapas previas de preparación del corte en calzado, en un entorno de robótica colaborativa.
Para ello, y a partir del análisis de las operaciones susceptibles de automatización, se han definido tres tipos de funciones básicas a realizar por el robot:
-Recogida/clasificación de piezas desde la máquina de corte.
-Preparación de piezas: apilado/ desapilado, volteo.
-Posicionado (pre-ensamblado) de piezas para aparado.
Además, con el hándicap añadido de que se trabaja con una gran variedad de piezas de tamaños y geometrías diversas, flexibles, de escaso espesor, que pueden presentar calados, y donde es necesario garantizar que no se producen daños superficiales, como arañazos o rozaduras, que malograrían elementos con una alta función estética.
Se plantea el desarrollo de tres tipos de manipuladores basados en diferentes tecnologías: mecánica, neumática y electroadhesión, y se ha diseñado una celda robótica de evaluación y validación de las soluciones propuestas
En este escenario se plantea el desarrollo de tres tipos de manipuladores basados en diferentes tecnologías: mecánica, neumática y electroadhesión, y se ha diseñado una celda robótica de evaluación y validación de las soluciones propuestas, donde adquiere especial relevancia la incorporación de un sistema de visión inteligente capaz de reconocer, a partir de una base de datos generada previamente, las diferentes piezas que se encuentran en el área de trabajo, determinando su tamaño (talla) posición, orientación y el punto óptimo de actuación del manipulador de que se trate y, con ello, las trayectorias del robot para realizar la operación en curso.
El desarrollo físico de los manipuladores ha supuesto un trabajo previo de selección de elementos, comerciales en algunos casos o diseñados específicamente, habiéndose construido diversos prototipos, con técnicas de impresión 3D, que han ido evolucionado hacia su optimización. Paralelamente, ha sido necesario realizar un trabajo intenso sobre el sistema de visión para garantizar su correcta calibración y la vectorización de la imagen, con el objetivo de reducir los tiempos de identificación de pieza y garantizar la precisión en su localización.
En consecuencia, se está implementando un gestor de la celda robótica que aúne las diferentes funcionalidades desarrolladas, garantizando un trabajo óptimo del sistema ante los retos planteados por las características específicas del tipo de elementos implicados en la fabricación del calzado, su variabilidad en el tiempo y la necesidad de mantener los elevados estándares de calidad que caracterizan al zapato made in Spain.
El objetivo último de MANICOBOT es el desarrollo de herramientas flexibles que permitan la incorporación de robots colaborativos en distintas etapas de la producción de calzado, actuando como asistentes del operario cualificado y liberándolo de tareas tediosas (o peligrosas por el uso de sustancias nocivas) de recogida, clasificación o preposicionado de piezas.
-

- Manipulador mixto.
-

- Celda con manipulador neumático.
FINANCIACIÓN: Convocatoria de ayudas del Instituto Valenciano de Competitividad Empresarial (IVACE) dirigida a centros tecnológicos de la Comunitat Valenciana para el ejercicio 2018 que cuenta con el apoyo del IVACE (Generalitat Valenciana) y la cofinanciación en un 50 % por la Unión Europea a través del Fondo Europeo de Desarrollo Regional (FEDER), dentro del Programa Operativo FEDER de la Comunitat Valenciana 2014-2020, con número de expediente IMDEEA/2018/51.

Categoría: Reportajes